
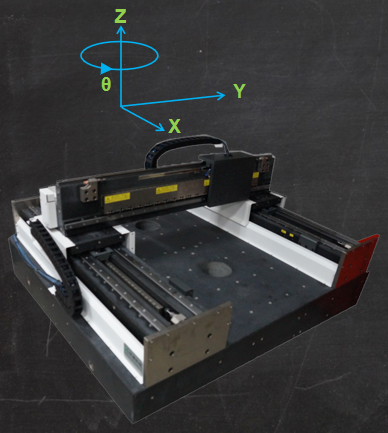
龙门双驱同步控制
龙门双驱是一种集高刚性、高速度、高精度于一体的控制结构。然而,由于龙门结构具有很强的结构耦合性,使对其的高速高精度控制往往存在较大的技术挑战。面对高速高精度的龙门结构控制,传统的主从方式或者联动控制方式无法彻底解决由结构不对称性以及耦合性而导致的动态误差,因此,支持龙门交叉解耦的伺服控制算法是目前针对高速高精度龙门控制的主流控制手段之一。此外,对于半导体行业,比如光刻机及其他高加减速定位龙门平台,为了进一步提高系统动态特性,提高系统加减速特性以及减小因负载位置/速度加速度变化而导致的解耦动力学耦合,基于逆动力学的龙门系统交叉解耦的控制算法成为一种解决方案。
龙门双驱交叉解耦解决方案
针对龙门双驱交叉解耦以及基于逆动力学的交叉解耦控制,开普思拓(北京)科技有限公司有一整套基于COMIC光纤运动控制系统的软硬件解决方案。其中针对龙门交叉解耦,我们支持主流的双X轴交叉解耦控制以及X-θ交叉解耦控制两种控制架构,前者具有较为简单的控制架构,而后者则是一种较为灵活的控制架构。两种交叉解耦的控制架构都可以配合逆动力学控制实现高动态响应龙门交叉解耦控制效果。
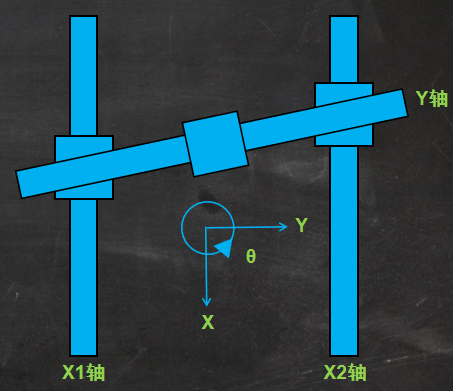
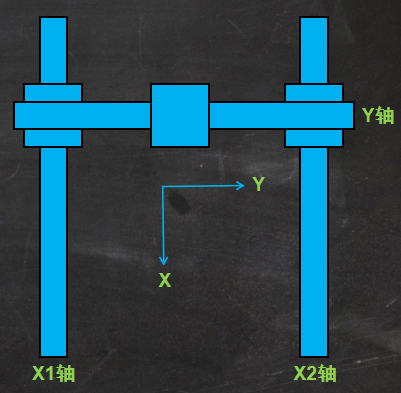
双X交叉解耦由于工件坐标系与关节坐标系完全一致,因此不需要进行运动学解算,而只需要完成两侧X轴实际位置的误差交叉解耦即可实现龙门交叉解耦控制。 而X-θ交叉解耦控制由于工件坐标系与关节坐标系存在非线性关系,因此需要进行运动学解算,但是由于θ轴(即C轴)的指令位置可以不为零,因此可以实现动态C轴误差补偿功能,这种动态误差补偿对于特殊应用中减少龙门机械耦合应力从而降低机械振动有着非常有效的作用,而无需进行交叉耦合控制增益调节。为了实现龙门交叉解耦以及逆动力学控制,COMIC光线总线式运动控制系统的通用伺服扩展从站中专门定制了协处理器模块(ARM芯片),可以用来实现以上所有的伺服控制算法,且为最终用户提供了自定义伺服算法接口,便于用户根据用户自身设备的不同模型定制开发适合于自己设备的控制算法。