分段绕组多动磁大行程直线电机传输系统
对于需要非接触式或者无尘传输(比如洁净室、真空或者具有高温、高压、辐射或者化学腐蚀的工作环境)的运动控制应用来说,由于采用永磁体作为定子,而电机绕组作为动子的传统直线电机平台,其动子平台上会存在动力电缆、反馈线缆,直接导致传统直线电机平台无法满足以上特殊应用环境的要求。解决这一问题的手段之一就是采用电机绕组作为定子,而永磁体作为动子的分段绕组多动磁体直线电机平台。本文主要介绍分段绕组多动磁体大行程直线电机传输系统的驱动与控制。
分段绕组多动磁直线电机技术
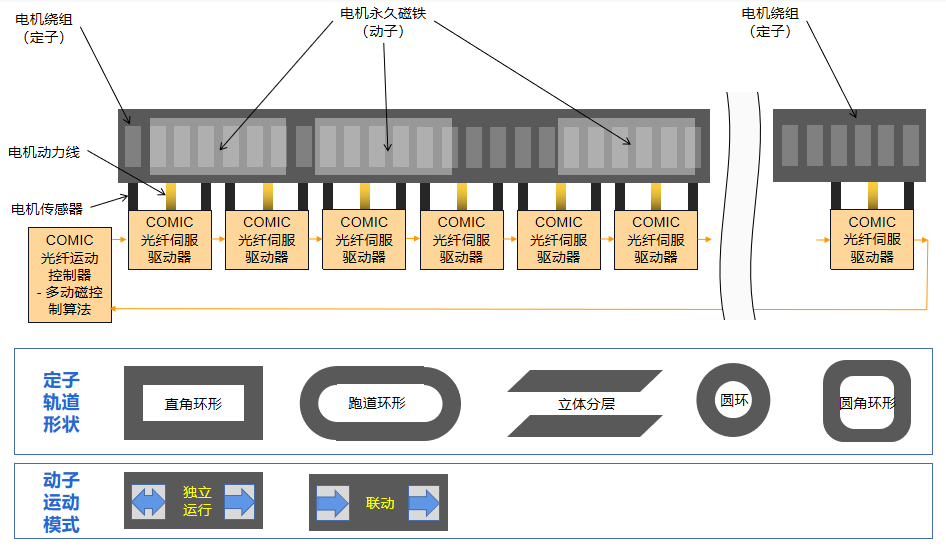
这种分段绕组多动磁直线电机技术,采用分段多绕组,多动磁的磁悬浮技术,通过合理控制分段绕组的电流以及换相, 从而实现多个动磁运动平台之间相互独立或者任意组合联动的运动效果,不仅可以实现以上特殊应用环境内的大行程传输需求, 同时也可以增加系统的传输拓扑结构的灵活性以及功能的多样性。

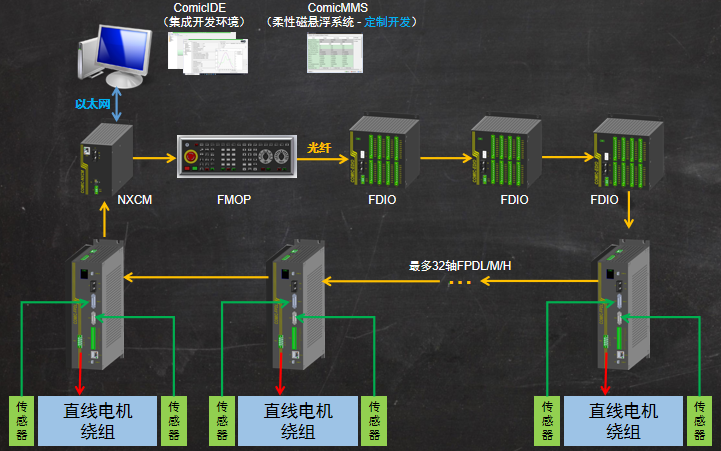
分段绕组多动磁体大行程直线电机传输系统的驱动与控制解决方案
此类应用中, 用户可以选择的机械部件主要包括特殊定制的电机绕组模块(直线模块或者1/4圆角模块)以及特殊定制的动磁平台模块。而系统中的电气部分采用了COMIC光纤运动控制器以及COMIC光纤伺服驱动器,其中每一个伺服驱动器连接一个电机绕组模块,并且同时支持两路编码器输入以及两路霍尔换相传感器。标准系统最多支持32个光纤伺服驱动器,即最多支持32个电机绕组模块,而标准系统最多支持16个动磁运动平台。高配系统最多支持32个动磁运动平台和不大于96个电机绕组模块,即做多支持96台光纤伺服驱动器(需要特殊控制系统的硬件选项和固件版本),基本上可以解决大多数多动磁体运动控制应用的需要。此外, 本系统必须选配COMIC专门针对分段绕组多动磁运动系统的软件包来实现对应的控制功能。